1. MQTT 介绍
- 它是一种 机器之间通讯 machine-to-machine (M2M)、物联网 Internet of Things (IoT)常用的一种轻量级消息传输协议
- 适用于网络带宽较低的场合
- 包含发布、订阅模式,通过一个代理服务器(broker),任何一个客户端(client)都可以订阅或者发布某个主题的消息,然后订阅了该主题的客户端则会收到该消息
1.1 消息主题
- 发布消息或者订阅消息都要选定一个消息主题,消息主题可以任意定制,类似文件系统,用 “/” 进行分隔,例如主题为 /a/b/c/d 的消息
- 客户端可以使用完全字符匹配消息,也可以使用通配符进行消息匹配
- 通配符 + :替换任意单个层级。比如订阅 /a/b/c/d、/a/+/c/d 、+/+/+/+ 主题的消息即可收到主题为 /a/b/c/d 的消息,而 b/+/c/d 、 +/+/+ 不会匹配
- 通配符 # :匹配任意层级,只能用于末尾, #、a/# 可以匹配上面的主题消息
- 长度为 0 的主题层级也是允许的。比如发布主题为 a//topic 的消息,客户端可以用 a/+/topic 进行匹配。/a/topic 的主题用 +/a/topic、#、/# 可以匹配。
1.2 服务质量(Quality of Service,QoS)
MQTT 定义了三种客户端与代理服务器之间消息到达的难度
- 0:broker/client 之间消息传一次,并不确认传到没有,消息可能丢失
- 1:broker/client 之间消息至少一次,带确认消息的传输,可能重复收到
- 2:broker/client 之间消息仅有一次,利用四次握手进行确认,网络延迟可能会增加 当客户端订阅的消息质量与代理服务器发布主题的质量不同时,客户端会选择难度最小的 QoS 接收消息
- 即当 broker 正在发送消息给 client 时,消息会保存,如果此时有新的 client 订阅了该主题的消息,那么它也会收到消息。这种做法的好处就是当消息主题经常变换的时候,如果有新的 client 订阅该消息,那么它不用等待太长的时间就可以收到消息
1.4 会话清除
- client 可以设置 clean session 标志位,当 clean session = false 时,client 失去连接时, broker 会一直保留消息直到 client 重新连接。而 clean session = true 时,broker 会清除所有的消息当这个 client 失去连接。
1.5 消息意愿
- 当 client 连接上 broker 时,client 会提示 broker 它有一个意愿消息,这个意愿消息将会在 client 失去连接时,broker 发送出去。消息意愿和普通消息一样都包含主题和内容。 以上来自知乎:https://zhuanlan.zhihu.com/p/41156335
1.6 下载EMQTT
1 | wget http://emqtt.com/static/brokers/emqttd-centos7-v2.3.1.zip |
1 | yum install unzip -y |
1 | unzip emqttd-centos7-v2.3.1.zip |
1.7 运行MQTT软件
进入 emqttd 主文件 :
1 | cd emqttd |
开始安装 emqttd 主文件 ,注意有小数点 :
1 | ./bin/emqttd console |
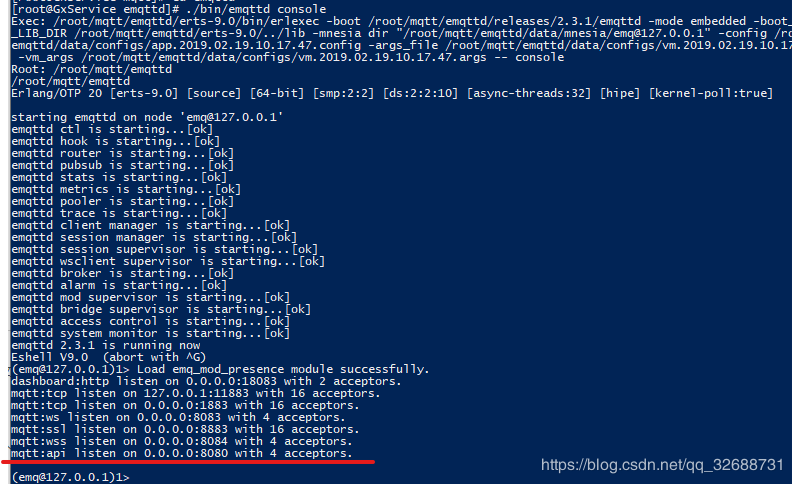
如果出现以下画面,恭喜,安装成功!
CTRL+ C 关闭控制台。守护进程模式启动:
1 | ./bin/emqttd start |
启动错误日志将输出在 log/ 目录。EMQ 消息服务器进程状态查询:
1 | ./bin/emqttd_ctl status |
-正常运行状态,查询命令返回:

1.8 服务器需开放的端口

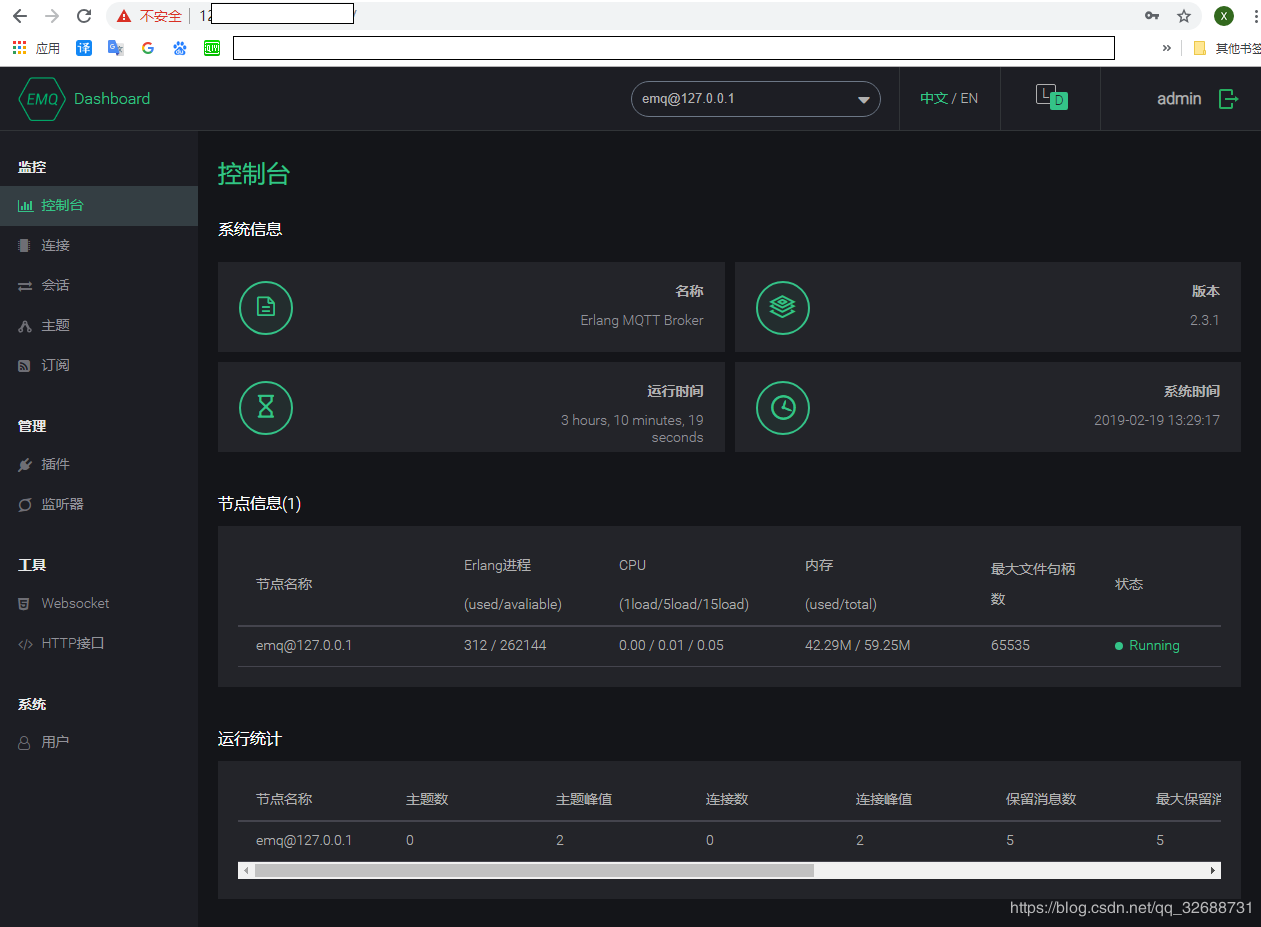
1.9 登陆MQTT后台
在浏览器输入该公网IP后面+端口号 :18083,进入后台。默认账号 admin ,密码 public
转自:https://blog.csdn.net/xh870189248/article/details/78867173