在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
1.舵机与控制原理
2.servo类介绍
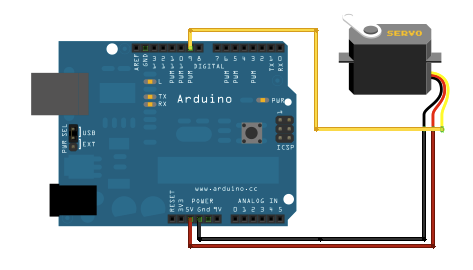
普通舵机有3根线:GND(黑)、VCC(红)、Signal(黄),一般情况下,我们建议为舵机单独供电,此处实验为了图方便,用arduino为舵机供电。
3.实例1 arduino控制器、舵机、** 杜邦线若干**
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 #include <Servo.h> Servo myservo; //创建一个舵机控制对象 // 使用Servo类最多可以控制8个舵机 int pos = 0; // 该变量用与存储舵机角度位置 /*~~~~~~~~~~~~~~~~~~~~~~~~~~华丽的分割线~~~~~~~~~~~~~~~~~~~~~~~~~~ */ void setup() { myservo.attach(9); // 该舵机由arduino第九脚控制 } /*~~~~~~~~~~~~~~~~~~~~~~~~~~华丽的分割线 ~~~~~~~~~~~~~~~~~~~~~~~~~~ */ void loop() { for(pos = 0; pos < 180; pos += 1) // 从0度到180度运动 { // 每次步进一度 myservo.write(pos); // 指定舵机转向的角度 delay(15); // 等待15ms让舵机到达指定位置 } for(pos = 180; pos>=1; pos-=1) //从180度到0度运动 { myservo.write(pos); // 指定舵机转向的角度 delay(15); // 等待15ms让舵机到达指定位置 } }
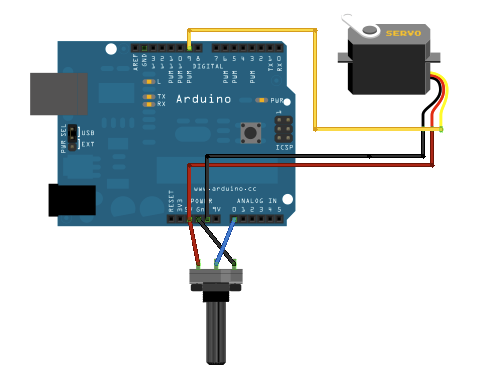
4.实例2
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 #include <Servo.h> Servo myservo; //创建一个舵机控制对象 int potpin = 0; //该变量用于存储用电位器读出的模拟值 int val; // 该变量用与存储舵机角度位置 void setup() { myservo.attach(9); // 该舵机由arduino第九脚控制 } void loop() { val = analogRead(potpin); //读取电位器控制的模拟值 (范围在0-1023) val = map(val, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180) myservo.write(val); // 指定舵机转向的角度 delay(15); // 等待15ms让舵机到达指定位置 }
5.其他驱动方法:
传送门: http://www.arduino.cn/thread-45-1-1.html
转自:https://www.arduino.cn/thread-1038-1-1.html